Auf unserer Website kommen verschiedene Cookies zum Einsatz: Technisch notwendige Cookies verwenden wir zu dem Zweck, Funktionen wie das Login oder einen Warenkorb zu ermöglichen. Optionale Cookies verwenden wir zu Marketing- und Optimierungszwecken, insbesondere um für Sie relevante und interessante Anzeigen bei den Plattformen von Meta (Facebook, Instagram) zu schalten. Optionale Cookies können Sie ablehnen. Mehr Informationen zur Datenerhebung und -verarbeitung finden Sie in unserer Datenschutzerklärung.
Dentale Implantate können anhand von dreidimensionalen Daten der Hart- und Weichgewebe vor dem chirurgischen Eingriff virtuell hinsichtlich einer prothetisch optimalen Lage geplant werden. Durch dynamische Navigationsverfahren wird deren Position anschließend auf die klinische Situation am Patienten übertragen. Zu den Vorteilen der dynamischen Navigation gegenüber der schablonengeführten Navigation zählen die Kompatibilität mit verschiedenen Implantatsystemen, die Unabhängigkeit von speziellen Bohrsystemen, das Implantieren unter Sicht, die Möglichkeit, intraoperative Änderungen unkompliziert vornehmen zu können, und die erleichterte Navigation in distalen Arealen. Die Ergebnisse der computergestützten dynamischen Navigation sind mit den Ergebnissen der statischen Navigation vergleichbar. Mindestabstände zu gefährdeten anatomischen Strukturen sind bei allen Verfahren der geführten Implantatinsertion einzuhalten. Eine ausgeprägte Lernkurve und das Vermeiden möglicher Fehlerquellen bei der Datenerhebung und bei der Übertragung der Implantatposition, wie zum Beispiel Patientenbewegungen, inkorrekte Positionierung der Referenzmarker oder fehlerhafte Zuordnung der Referenzmarker im Implantatplanungsprogramm, sind zu beachten.
Dr. Cornelia Edelmann, Martin Wetzel und PD Dr. Sigmar Schnutenhaus beleuchten in ihrem Beitrag für die Implantologie 3/21 eingehend die theoretischen Aspekte der dynamischen Navigation und die klinische Anwendung anhand von zwei Behandlungsfällen.
In keiner anderen Disziplin der Zahnmedizin schreitet die Entwicklung so schnell voran wie in der Implantologie. Ziel der Zeitschrift ist es, dem Fortbildungsangebot im Bereich der Implantologie durch die Veröffentlichung praxisbezogener und wissenschaftlich untermauerter Beiträge neue und interessante Impulse zu geben und die Zusammenarbeit von Klinikern, Praktikern und Zahntechnikern zu fördern. Mehr Infos zur Zeitschrift, zum Abo und zum Bestellen eines kostenlosen Probehefts finden Sie im Quintessenz-Shop.
Einleitung
Die möglichst natürliche, funktionelle und ästhetische Wiederherstellung des Kauorgans nach Zahnverlust ist das Ziel jeder implantatprothetischen Versorgung1. Unabdingbar sind dabei einerseits die Schonung aller anatomischen Nachbarstrukturen und gleichzeitig das Anstreben eines für die weitere prothetische Versorgung günstigen Austrittspunktes des Implantats in Position und Höhe. Andererseits gilt es, den vorhandenen Knochen des Alveolarfortsatzes optimal zu nutzen, da eine ausreichende knöcherne Situation um das Implantat von entscheidender Bedeutung für den Langzeiterfolg des Implantats ist2,3. Weitere entscheidende Aspekte, wie zum Beispiel die Abstände zwischen den Implantaten, den Implantaten und deren Nachbarzähnen4, die Weichgewebesituation5 oder die Lage des Zementspalts6, sind zu berücksichtigen. Mithilfe einer prothetisch orientierten Planung kann ein optimales und vorhersagbares Ergebnis erzielt werden7. Die Umsetzung der prothetisch orientierten dreidimensionalen Planung kann mit geführten Implantationsverfahren erfolgen1. Eine Untersuchung mit einem Nachuntersuchungszeitraum von einem Jahr zeigte, dass computerassistierte Verfahren keinen Einfluss auf die Implantatüberlebensrate im Vergleich zu konventionellen Verfahren haben8.
Potenziell schwerwiegende chirurgische Komplikationen wie die Verletzung von anatomischen Strukturen (zum Beispiel von Nerven, Gefäßen oder des Sinus maxillaris) können reduziert werden9. Computerassistierte Implantationen sind eine vorteilhafte Behandlungsoption bei zahnlosen Patienten, sofern ein Vorgehen ohne die Bildung eines Mukoperiostlappens (flapless) geeignet ist10. Gargallo-Albiol et al. zeigten in einem systematischen Review, dass ein Vorgehen ohne Lappenbildung den Patientenkomfort deutlich steigert. Die Patienten haben weniger Schmerzen, eine geringere Schwellung im Operationsgebiet, nehmen weniger Schmerzmittel ein und zudem verringert sich die Operationsdauer11.
Die dreidimensionale Planung bildet die Grundlage für computerassistierte Implantationen. Bei diesen wird anhand von dreidimensionalen computertomografischen (CT) oder digitalen volumentomografischen (DVT) Daten die anatomische Situation der Implantatregion mit dem digitalisierten prothetischen Planungsziel zusammengeführt1. Die Umsetzung einer digitalen Implantatplanung kann mit computerassistierten Verfahren realisiert werden12.
Ein etabliertes Verfahren ist die statische Navigation mit der Verwendung von Bohrschablonen13. Durch dieses Verfahren können eine klinisch ausreichende Genauigkeit und prothetisch vorhersagbare Ergebnisse erzielt werden11,14.
Neben den statischen Verfahren gibt es des Weiteren auch dynamische computerassistierte chirurgische Verfahren zur Übertragung der dreidimensionalen Planung auf die klinische Patientensituation1. Dabei kann der Operateur während der Implantatbettaufbereitung und Implantatinsertion die dreidimensionale Position der Instrumente in Echtzeit auf einem Bildschirm verfolgen und entsprechend der Planung navigiert implantieren15. Ermöglicht wird dies durch optische Trackingsysteme, welche definierte Referenzmarker erkennen16. Zur intraoralen Referenzierung werden Referenzmarker, beispielsweise an den Zähnen, am Knochen oder an der Mukosa, fixiert im Patientenmund angebracht. Extraorale Referenzmarker können am Kopf des Patienten oder auch im Operationssaal angebracht werden. Die Marker müssen sich im Blickwinkel der Kamera befinden, die zumeist auf dem chirurgischen Handstück angebracht ist. Die dynamische Navigation wurde in den vegangenen Jahren durch die Weiterentwicklung der Computertechnologie − und damit verbunden computergestützter Verfahren − vermehrt klinisch eingesetzt1.
In diesem Beitrag wird eine Einführung in die dynamisch navigierte Implantation gegeben. Mögliche Vor- und Nachteile, erste Ergebnisse zur Genauigkeit sowie zu den Voraussetzungen für die dynamische Navigation werden beleuchtet. Die klinischen Aspekte der dynamischen Navigation sowie das Vorgehen werden anhand von zwei klinischen Fällen dargestellt.
Material und Methode
Eine elektronische Literatursuche der MEDLINE- (PubMed)-Datenbank wurde am 5. März 2021 mit folgendem Suchterm durchgeführt: (dental implantation[MeSH Terms]) OR dental implant[MeSH Terms]) AND dental navigation) OR computer aimed dental implant) OR three dimensional dental planning) OR 3D dental planning) OR computer assisted dental implant) OR guided dental implant placement) OR dental surgical template) OR dental guided surgery) OR dental surgical guide) OR guided dental implant placement) AND ((dynamic) OR (robot*)). Es erfolgte eine exemplarische Betrachtung und Bewertung der Studien.
Ergebnisse
Mögliche Vorteile und Indikationen einer dynamischen Navigation
Die Navigation in der Implantologie bietet eine Reihe von Vorteilen. Durch die dreidimensionale Behandlungsplanung sind eine umfassende Diagnose der vorliegenden Situation sowie die klinische Umsetzung der geplanten Implantatposition am Patienten mit vorhersagbarem prothetischen Ergebnis möglich17. Die dynamische Navigation weist im Vergleich zur statischen Navigation verschiedene Vorteile auf. Durch die „open-sourced“ Systeme können für die dynamische Navigation beliebige Implantatsysteme genutzt werden1. Im Vergleich zur vollständig geführten Navigation ist es möglich, unter Sicht auf intraoperative situationsbedingte Änderungen zu reagieren11. Des Weiteren sollte die Einhaltung der horizontalen Position mit einem unter Sicht kontrollierbaren dynamischen System sicherer handhabbar sein als mit statischen Systemen, bei denen eine Schablone das Operationsfeld verdeckt. Eine Einschränkung stellt hierbei die Lagerung des Halters für intraorale Referenzmarker bei zahnlosen Patienten dar, sodass nicht jedes dynamische Navigationsystem für die Versorgung zahnloser Kiefer geeignet scheint18. Insbesondere bei einem lappenlosen Vorgehen sind die Nachteile der Lagerung einer statischen Schablone bei teilbezahnten Patienten nicht vorhanden1. Die Aufbereitung des Implantatbetts kann auch bei geringer Mundöffnung oder in weit distal gelegenen Regionen, in denen das vertikale Platzangebot limitiert ist, durchgeführt werden19. Eine mögliche Überhitzung der Bohrer durch mangelnden Zugang für Kühlflüssigkeit − wie bei geschlossenen Bohrschablonen − kann umgangen werden20.
Mögliche Nachteile und Risiken einer dynamischen Navigation
Die Position und Passung der intraoralen Referenzmarker sind mögliche Fehlerquellen, die sich negativ auf die Genauigkeit auswirken können. Der Sitz des Halters muss ähnlich wie der einer Bohrschablone bei der statischen Navigation während des Eingriffs stetig kontrolliert werden15. Jeder einzelne Schritt bei der Datenerhebung sowie die Auflösung der verwendeten Scan-, Druck- und/oder DVT-Daten können Ungenauigkeiten verursachen. Die einzelnen Komponenten müssen so präzise wie möglich funktionieren, damit das Resultat aus der Summe der Fehler am Ende eine klinisch tolerable Abweichung der Implantatposition ergibt21. Mindestabstände zu gefährdeten anatomischen Strukturen sind bei allen Verfahren der geführten Implantation einzuhalten22. Die in der Literatur angegebenen Sicherheitsabstände liegen horizontal zwischen 1,0 mm23 und 0,5 mm24 beziehungsweise vertikal 1,7 mm25 und 1,2 mm24. Zu beachten ist außerdem, dass sich die Behandler und das gesamte Team aufgrund einer ausgeprägten Lernkurve und der Komplexität des operativen Eingriffs entsprechend einarbeiten müssen19. Es wurde gezeigt, dass Chirurgen mit steigender Anzahl der inserierten Implantate genauere Ergebnisse der Implantatposition erzielen26. Je nach Navigationssystem und Ausstattung der Praxis können nennenswerte Kosten für das Etablieren der dynamisch navigierten Implantation anfallen.
Vergleich der Genauigkeiten dynamisch vs. statisch
Ergebnisse der dynamischen Navigation
Bisher liegen wenige klinische Studien zu aktuellen Verfahren vor, die die Genauigkeit der Implantatpositionen bei der dynamischen Navigation untersuchen26−35. In drei systematischen Reviews wurden die bisher publizierten Daten zur Genauigkeit der dynamischen Navigation analysiert. Die Vergleichbarkeit dieser Studien ist aufgrund von heterogenen Co-Faktoren, wie zum Beispiel der Verwendung verschiedener dynamischer Navigationssysteme, unterschiedlicher Implantatplanungsprogramme und unterschiedlicher Implantate, erschwert. Im Mittel lag die koronale 3-D-Abweichung an der Implantatschulter zwischen 1,0 mm (95-Prozent-Konfidenzintervall [KI] 0,83, 1,16 mm) und 1,11 mm (95-Prozent-KI 0,96, 1,26 mm); die Winkelabweichungen lagen zwischen 3,68° (95-Prozent-KI 3,61−3,74°) und 4,22° (95-Prozent-KI 2,74–5,68°)18,36,37.
Die Autoren eines systematischen Reviews von Wei et al. kamen zu dem Ergebnis, dass keine signifikanten Unterschiede zwischen In-vitro- und klinischen Studien festgestellt wurden36. Bei der klinischen Umsetzung der dynamischen Navigation am Patienten scheinen demnach mögliche Einflussfaktoren, wie zum Beispiel die Mundöffnung, Bewegungen des Patienten oder die eingeschränkte Sicht auf das OP-Feld, keine Verschlechterung der Ergebnisse darzustellen. Die dynamische Navigation setzt voraus, dass die Position der Instrumente durch einen Referenzkörper erkannt und der virtuellen Planung zugeordnet werden kann. Die Platzierung der Marker unterscheidet sich je nach System deutlich. Eine systematische Übersichtsarbeit von klinischen Studien zur Genauigkeit der dynamischen computergestützten Navigation zeigt Ergebnisse, die mit denen der statischen Navigation vergleichbar sind. Allerdings weisen die einzelnen dynamischen Navigationssysteme eine große Heterogenität auf37. Es muss in weiteren Untersuchungen gezeigt werden, ob dies hauptsächlich auf die verwendeten dynamischen Navigationssysteme zurückzuführen ist. Von den einzelnen Systemen liegen meist nur Untersuchungen jeweils einer Arbeitsgruppe vor. Das System IRIS-100 (Fa. EPED Inc., Kaohsiung City, Taiwan) fand bereits Anwendung in zwei unabhängigen klinischen Studien. Die Ergebnisse zeigten eine vergleichbare Präzision auf: Mittlere koronale Abweichungen von 1,24 ± 0,39 mm vs. 1,05 ± 0,44 mm und eine Winkelabweichung von 3,78 ± 1,84° vs. 3,06 ± 1,37° wurden gezeigt30,34. Wu et al. konnten keine signifikanten Unterschiede zwischen den operierenden Chirurgen und deren Erfahrungsleveln feststellen33. Diese Ergebnisse lassen vermuten, dass eine gewisse Robustheit der Werte auch bei der Anwendung durch unterschiedliche Chirurgen vorliegt.
Ergebnisse der statischen Navigation
Tahmaseb et al. untersuchten 20 klinische Studien hinsichtlich der Genauigkeit von statisch navigierten Implantationen. Die mittlere Abweichung aller Studien belief sich auf 1,2 mm an der Implantatschulter und 1,4 mm an der Implantatspitze. Die mittlere Winkelabweichung betrug 3,5°13. Die Verwendung dieser Schablonen führt zu vorhersagbaren Ergebnissen11. Zahlreiche Untersuchungen zur schablonengeführten Implantation versuchen Faktoren zu bestimmen, die Einfluss auf die Genauigkeit der Verfahren haben. Einfluss auf die Genauigkeit haben zum Beispiel verschiedene Verfahren der Herstellung oder verwendete Materialen für Bohrschablonen38−40. Unterschiedliche Bohrhülsen41−43 können ebenso wie die intraorale Lagerung und Fixation der Schablonen44 Einfluss auf die Genauigkeit haben. Anwendungsfehler bei der Umsetzung scheinen jedoch zu größeren Ungenauigkeiten zu führen als das Verfahren per se45.
Vergleich der beiden Verfahren
In einer retrospektiven Untersuchung von Wu et. al. wurden weder am koronalen oder apikalen Endpunkt noch in der Winkelabweichung signifikante Unterschiede zwischen dynamischer und statischer Navigation bei der Auswertung von insgesamt 95 Implantaten gefunden33. Auch Yimari et al. stellten in einer randomisierten klinischen Studie keine signifikanten Unterschiede zwischen statischer und dynamischer Navigation fest34. In einer In-vitro-Untersuchung von Mediavilla-Guzmán et al. gab es ausschließlich bei der Winkelabweichung signifikant verschiedene Werte zugunsten der statischen, schablonengeführten Implantation. Diese lag im Mittel bei 2,95 ± 1,48° im Gegensatz zur dynamischen Implantation mit 4,00 ± 1,41°46. Diese Daten stehen im Gegensatz zu einer weiteren In-vitro-Untersuchung, bei der ein dynamisches Verfahren mit einem statischen Verfahren verglichen wurde und signifikante Unterschiede in allen Parametern zugunsten des statischen Verfahrens aufgezeigt wurden47. Im Vergleich zur Freihand-Implantation, welche in einer Studie von Vercruyssen et al. eine mittlere Winkelabweichung von 9,9° aufwies, erzielen beide geführte Verfahren genauere Ergebnisse48.
Empfohlene Voraussetzungen für die dynamische Navigation
Anforderungen an Patienten und Behandler
Geeignet für eine Implantation mittels dynamischer Navigation scheinen zum aktuellen Zeitpunkt vor allem teilbezahnte Patienten zu sein. Die vorliegenden klinischen Untersuchungen zur dynamischen Navigation wurden vermehrt bei teilbezahnten Patienten durchgeführt37. Die Befestigung der Referenzmarker auf den Restzähnen ermöglicht eine reproduzierbare Positionierung der intraoralen Referenzmarker. Der korrekte Sitz der Referenzmarker, das Vermeiden von Patientenbewegungen während der Implantation und die erfolgreiche Registrierung der Implantatbohrer sind für eine möglichst genaue Übertragung der 3-D-Planung auf die klinische Situation zu beachten18. Zudem muss eine einwandfreie Registrierung der Referenzmarker durch die Planungssoftware während der Implantation gewährleistet werden, was eine ununterbrochene Sicht der optischen Systeme auf den Referenzmarker bedeutet.
Anforderungen an das Implantatsystem
Implantatsysteme können mit verschiedenen dynamischen Navigationssystemen genutzt werden. Durch die „open-sourced“ Systeme können Chirurgen ihr gewohntes Implantatsystem verwenden. Das Equipment kann häufig reduziert werden. Im Vergleich zu statischen Systemen sind keine zusätzlichen Sets von Bohrern und Hülsen erforderlich1.
Diskussion/Klinisches Vorgehen
Fall 1
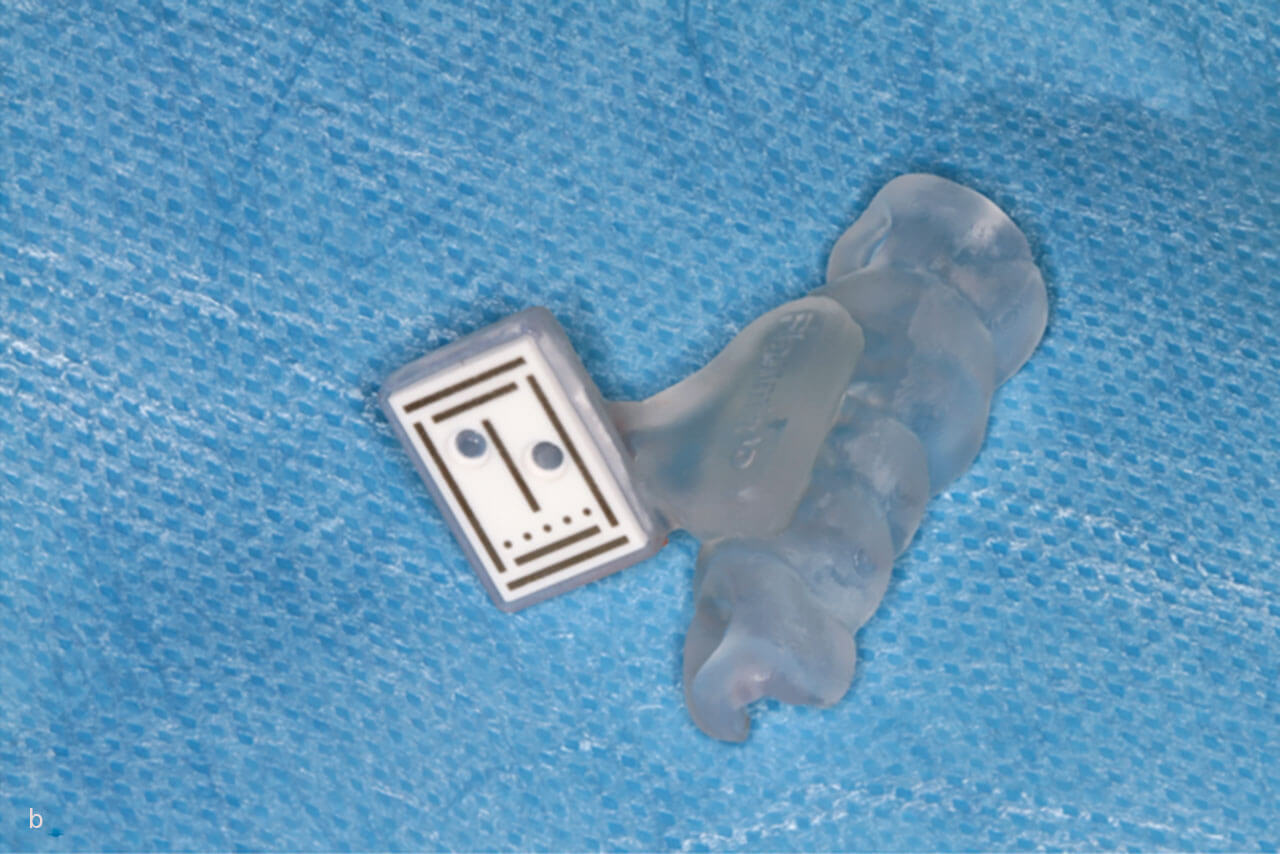
Bei einem 59-jährigen Patienten wurden zum Lückenersatz im Unterkiefer (Abb. 1a) zwei Implantate (BoneLevelTapered, Straumann) Regio 36 und 37 inseriert. Für die Implantatplanung wurden ein DVT sowie eine digitale Abformung der Patientensituation angefertigt und anschließend nach prothetischen Grundsätzen ein virtuelles Set-up erstellt. Die Position der Implantate wurde so gewählt, dass die Implantate einen idealen prothetischen Implantataustrittspunkt sowie eine ideale Angulation unter Berücksichtigung der anatomischen Strukturen und der optimalen Nutzung des Knochenangebots aufwiesen. Die Daten der dreidimensionalen Behandlungsplanung wurden an das Navigationssystem Denacam (Mininavident) übertragen. Das Denacam-System arbeitet mit einer am chirurgischen Handstück angebrachten Kamera. Intraoral wurde ein Marker als Referenzstruktur platziert. Die Passung der Schablone des Referenzmarkers konnte mittels Sichtfenster (Regio 32, 34) während der Implantation überprüft werden (Abb. 1b).
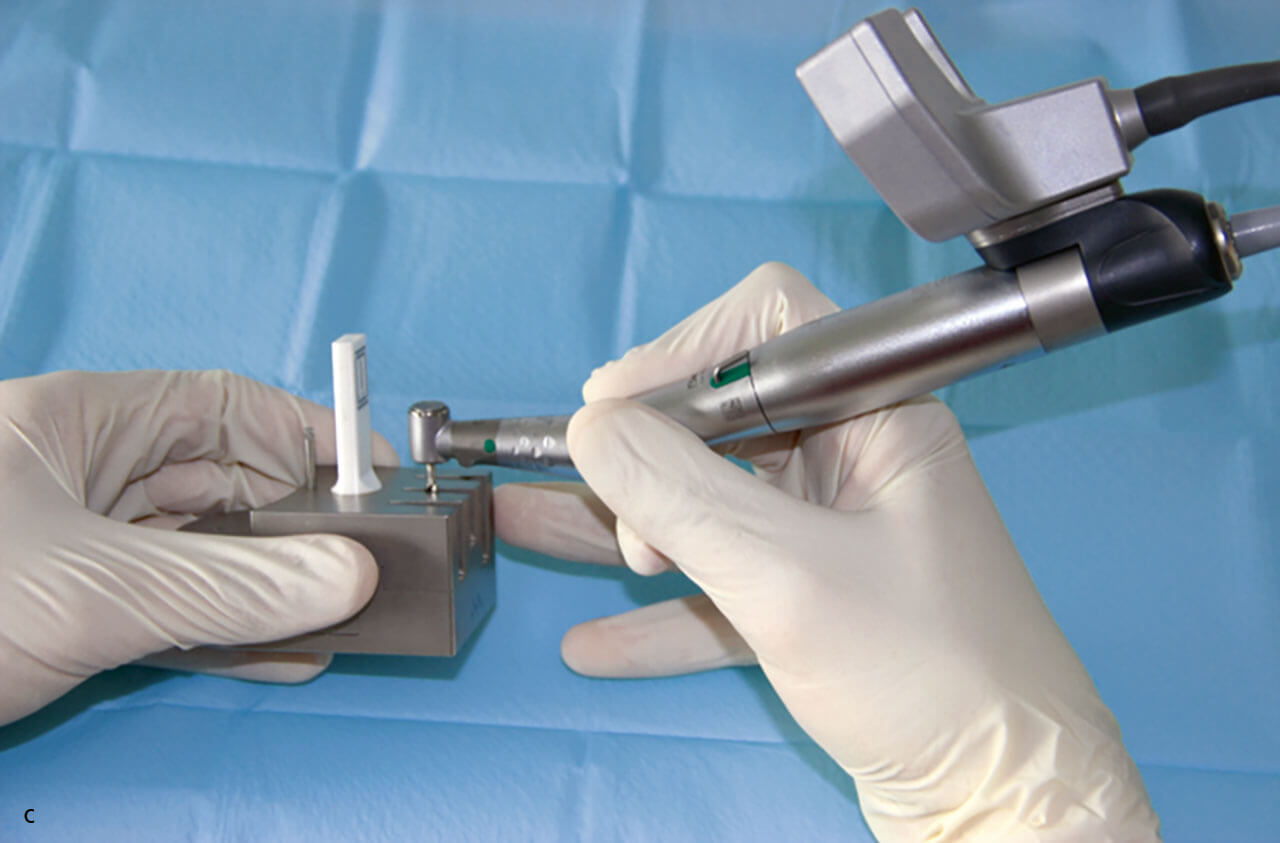
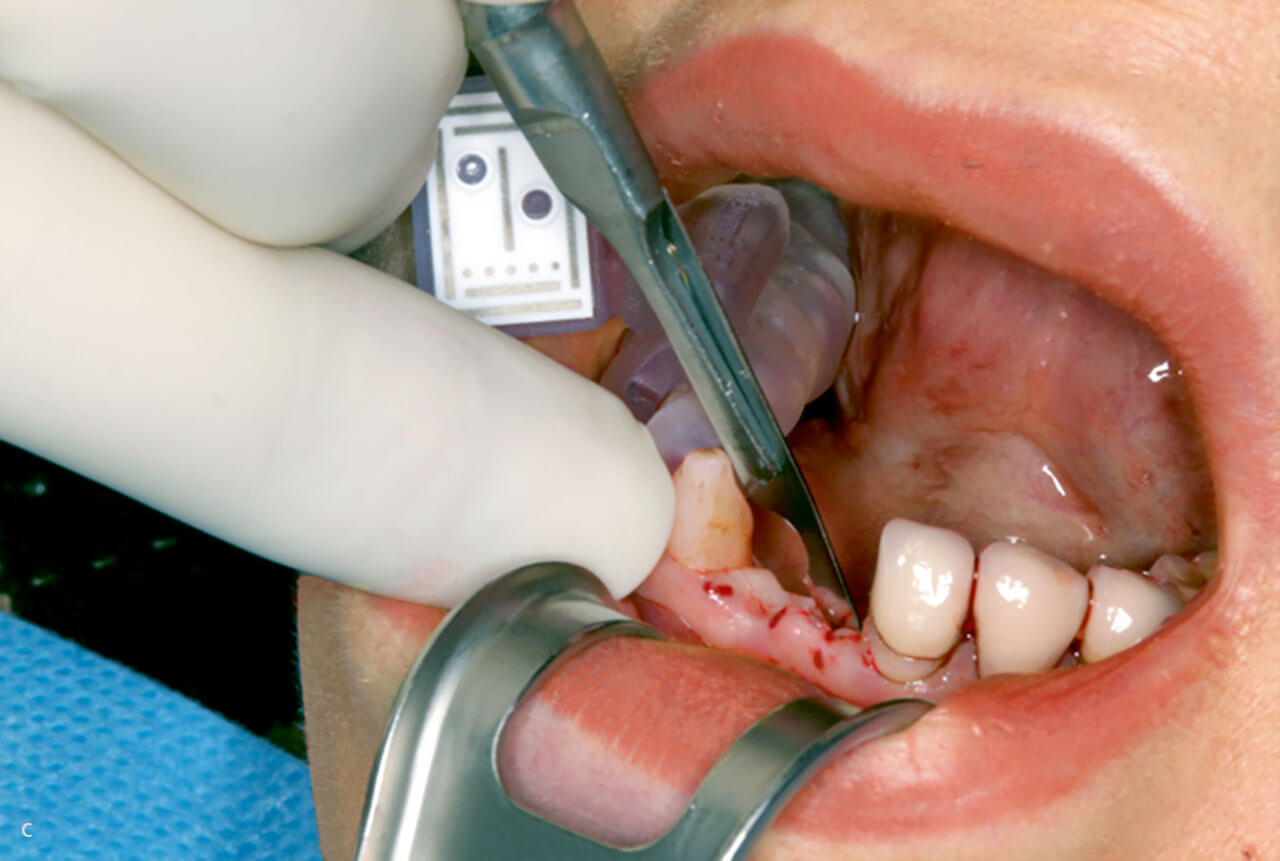
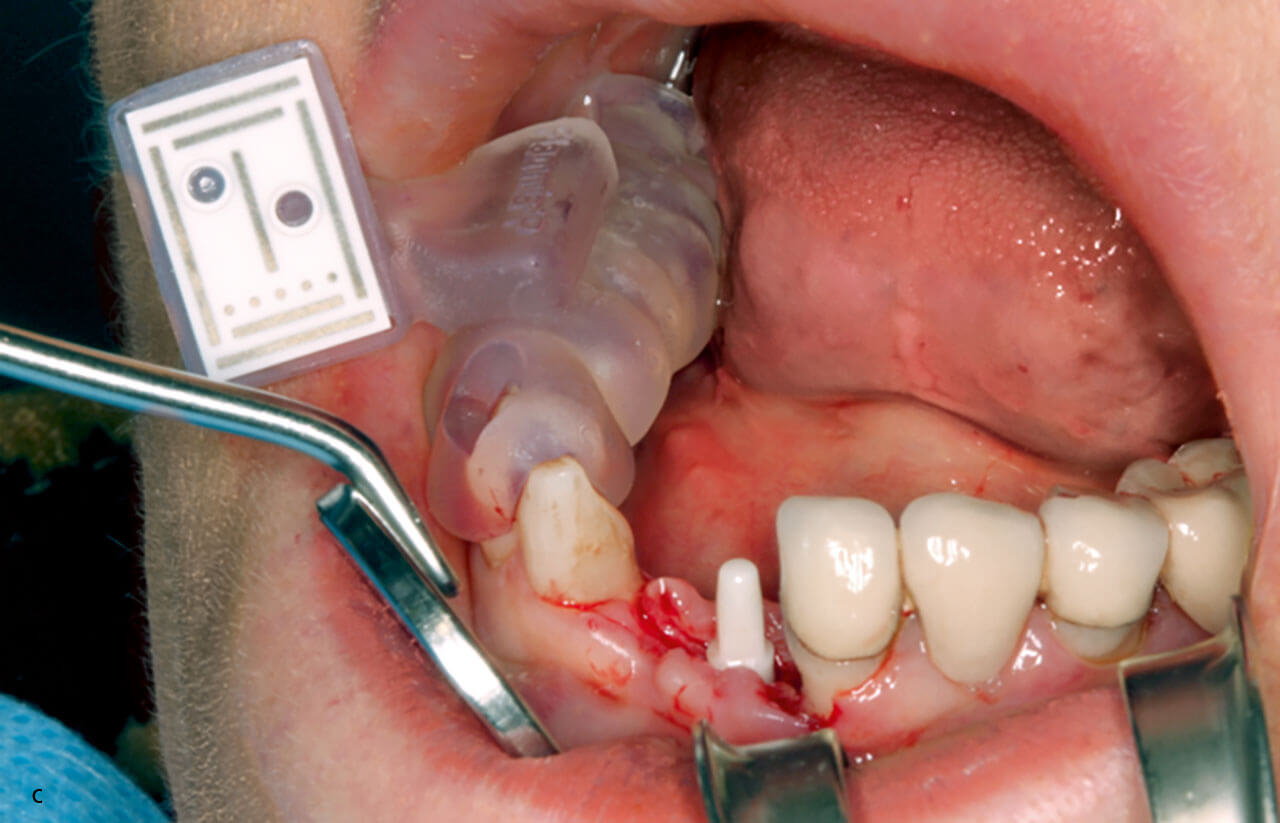
Jeder Bohrer, auch das Implantat selbst, wurde mithilfe eines Registrierungsinstruments (Abb. 1c) vor der jeweiligen Nutzung automatisch registriert. Dieser Schritt ist notwendig, um dem System genaue Informationen zur Länge und zum Durchmesser des jeweils verwendeten Bohrers zu übermitteln.
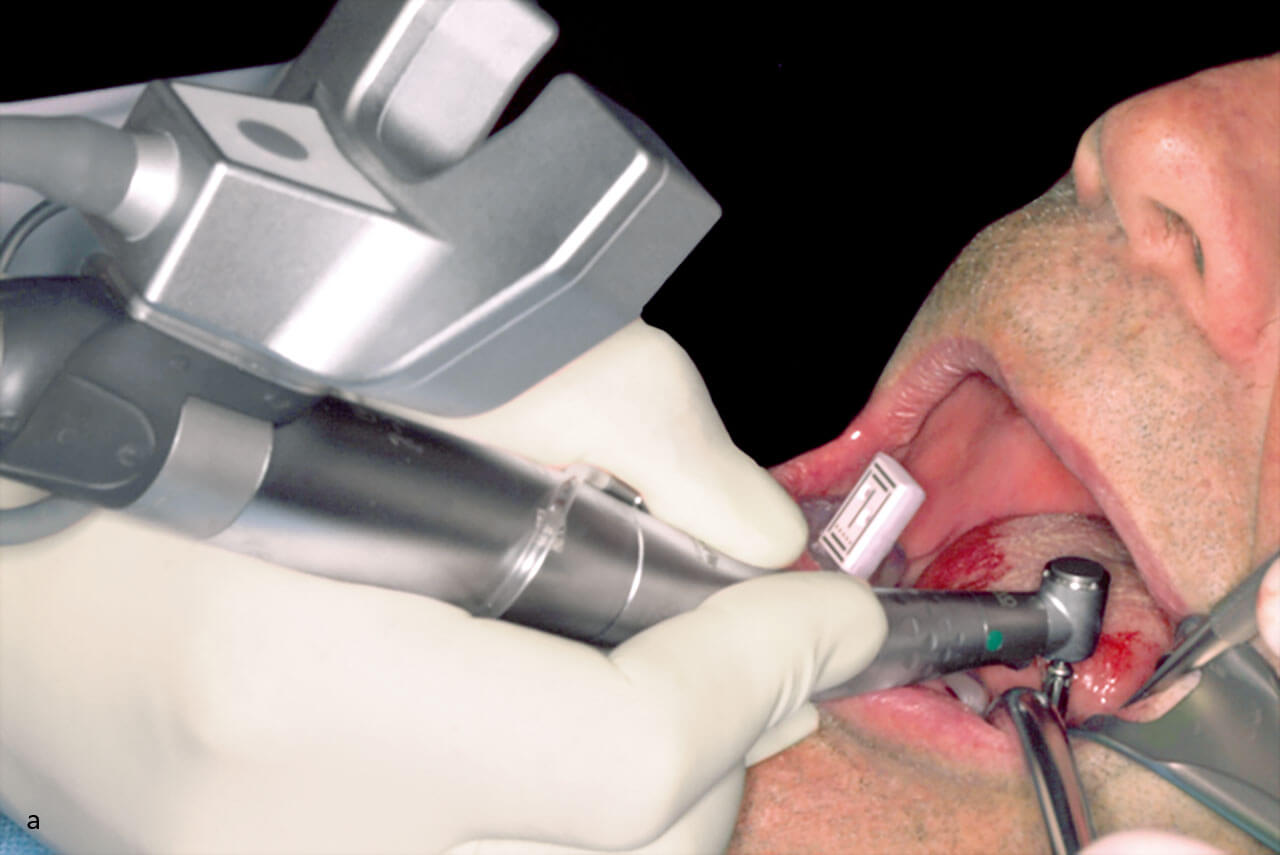
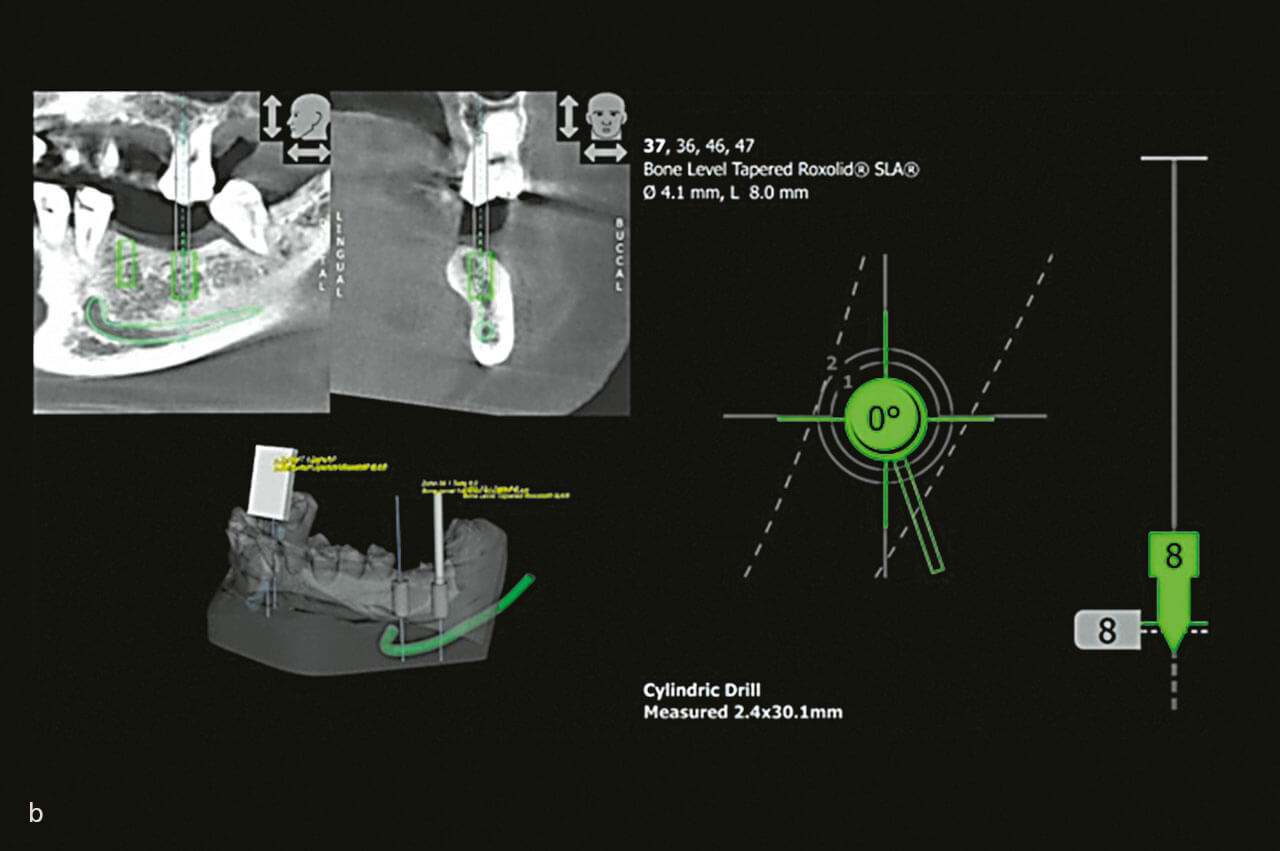
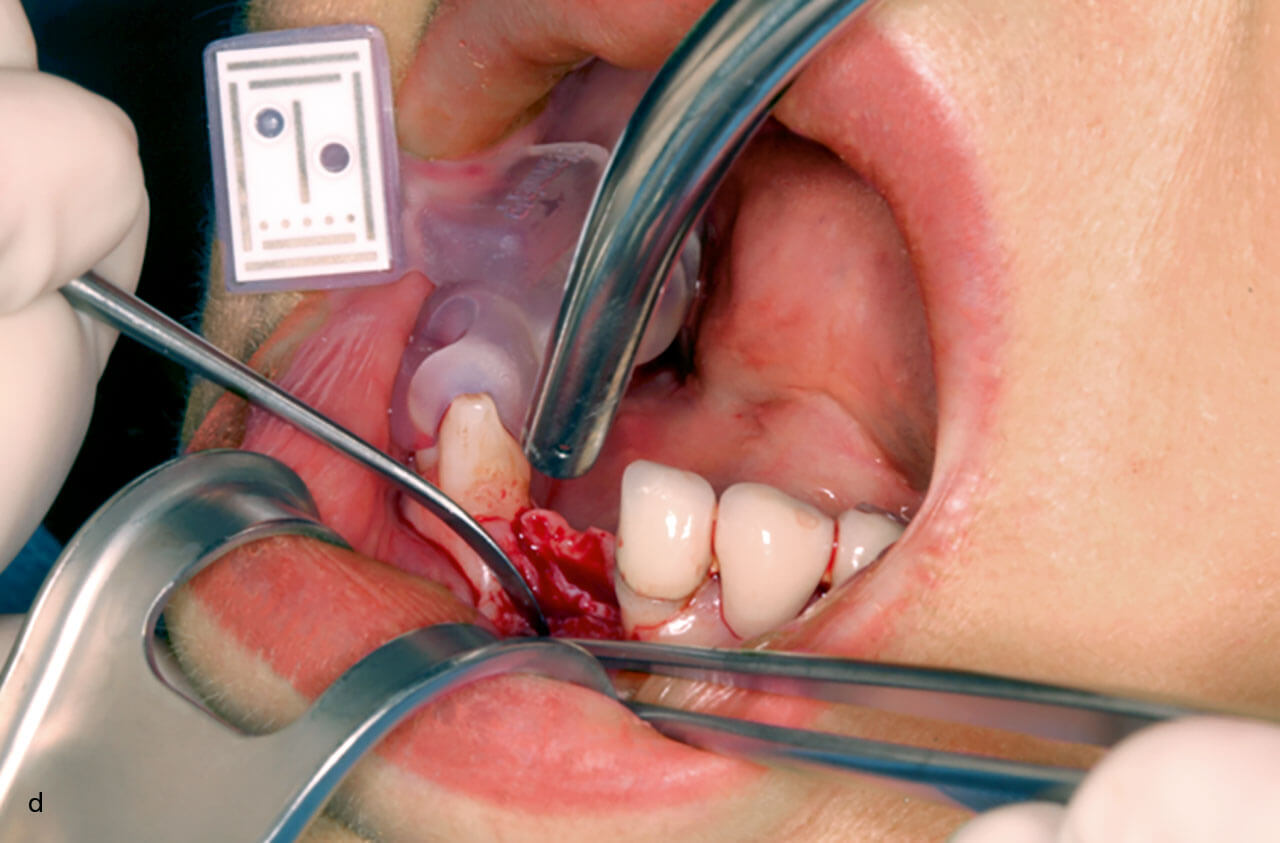
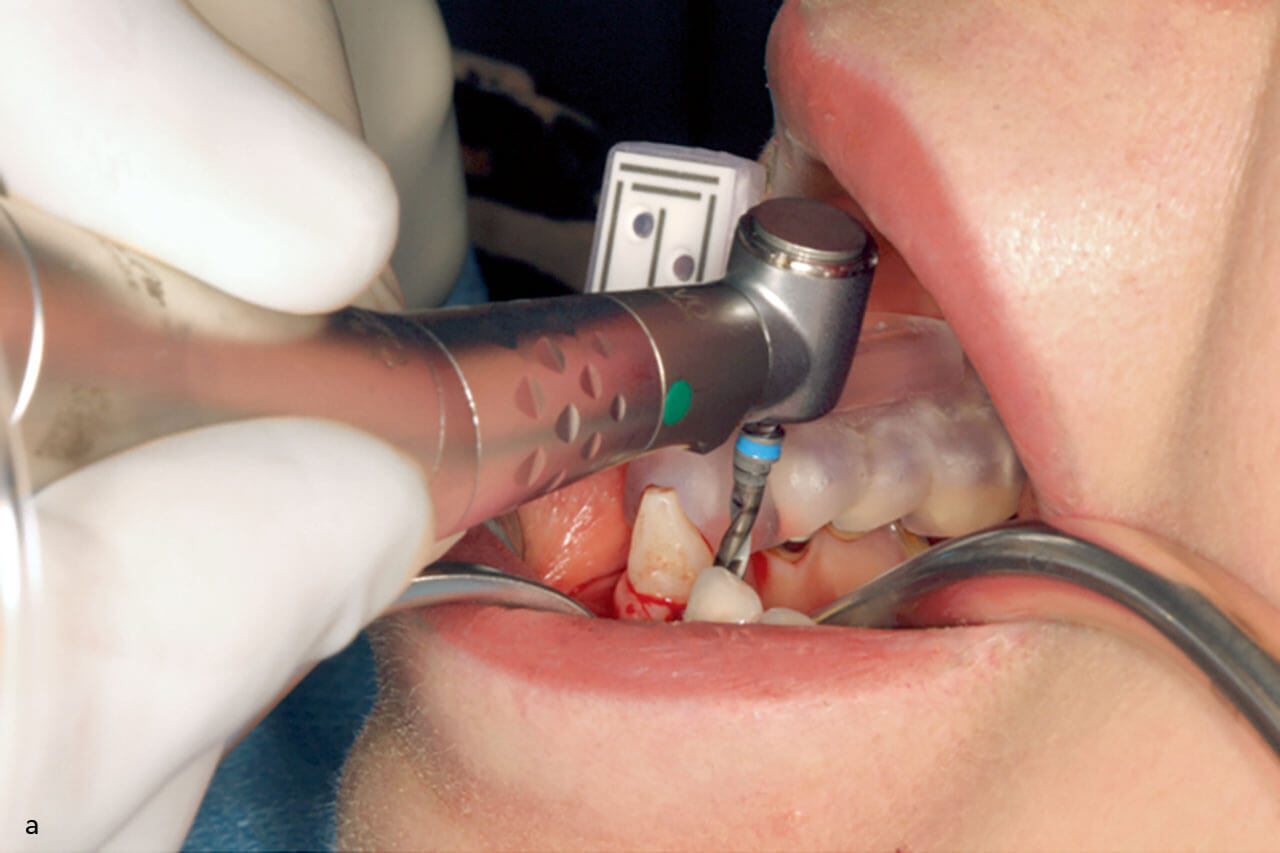
Die Implantation erfolgte nach dem Bohrprotokoll des Implantatherstellers. Alle Implantationen wurden von einem erfahrenen Zahnarzt (SiS) durchgeführt (Abb. 1d und 2a). Sämtliche Schritte erfolgten maschinell mithilfe eines Winkelstücks. Die Endposition des Implantats wurde durch die Anzeige im Denacam-System festgelegt (Abb. 2b). Es erfolgte keine visuelle Kontrolle der erreichten Implantatendposition und Nachjustierung der Implantatposition.
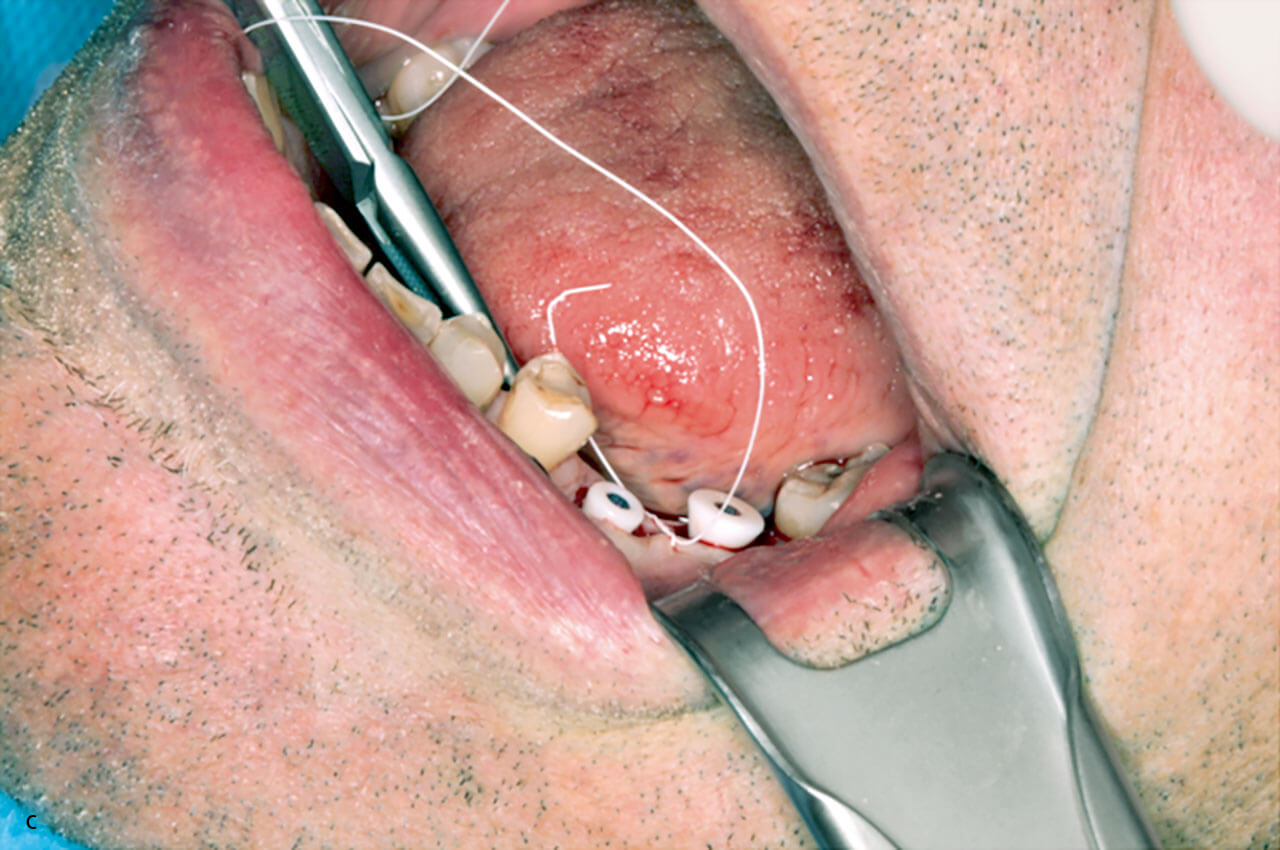
Die beiden Implantate konnten mit einer ausreichenden Primärstabilität inseriert werden. Nach der Implantation wurden die Implantataufbauten mit Gingivaformer versorgt und das Weichgewebe dicht vernäht, sodass eine transgingivale Einheilung erfolgen konnte (Abb. 2c). Abschließend wurde ein postoperatives Kontrollröntgenbild erstellt (Abb. 2d).
Abb. 1 a Die Ausgangssituation zeigt die zu versorgende Lücke im 3. Quadranten.
Abb. 1 b Der intraorale Referenzmarker ist an einer gedruckten Schablone befestigt und der Sitz der Schablone kann mittels günstig platzierter Sichtfenster kontrolliert werden.
Abb. 1 c Registrierung des Implantatbohrers mit einem Registrierungsinstrument; das optische System (DENAOPT) ist am chirurgischen Winkelstück angebracht.
Abb. 1 d Implantatbohrung nach Herstellerprotokoll.
Abb. 2 a Implantatinsertion: Zwischen dem optischen Kamerasystem und dem intraoralen Referenzmarker muss die Sicht gewährleistet sein.
Abb. 2 b Dynamische Echtzeitanzeige von Winkel, Position und Tiefe.
Abb. 2 c Die aufgeschraubten Zirkon-Gingivaformer in situ; das Weichgewebe wurde speicheldicht vernäht.
Abb. 2 d Postoperatives Kontrollröntgenbild.
Fall 2
Die Ausgangsituation einer 48-jährigen Patientin zeigt eine Frontzahnlücke Regio 31−41 (Abb. 3a). Aufgrund der Lückenbreite sowie der knöchernen Situation wurde bei der dreidimensionalen Implantatplanung die Versorgung mit einem Implantat (PureCeramic, Straumann) geplant. Der Wunsch der Patientin war ein keramisches Implantat. Auch in diesem Fall erfolgte ein sogenanntes Backward-Planning, welches im ersten Fall bereits beschrieben wurde. Besonders im Frontzahngebiet ist eine optimale prothetische Implantatposition für das ästhetische Ergebnis unabdingbar. Die Positionierung der Implantate hat signifikanten Einfluss auf das Auftreten von Gingivarezessionen49. Die schablonengestützte Implantation vermeidet eine Fehlpositionierung der Implantate und wirkt dem erhöhten Risiko einer Rezessionsbildung durch zu weit bukkal inserierte Implantate entgegen. Das chirurgische Vorgehen konnte komplett unter Sicht erfolgen, ohne durch eine Bohrschablone beeinträchtigt zu werden, wie sie bei statischen Systemen benötigt wird (Abb. 3b bis d, Abb. 4a bis c). Die Implantation des einteiligen Keramikimplantats erfolgte ebenfalls nach dem Herstellerprotokoll und wurde vom selben Behandler durchgeführt (SiS). Das Operationsfeld wurde speicheldicht vernäht und die Lücke mit einem laborgefertigten Langzeitprovisorium auf dem Implantat 31 mit einem Freiendbrückenglied 41 versorgt (Abb. 4d). Das Langzeitprovisorium wurde im CAD/CAM-Verfahren hergestellt und über eine Dauer von drei Monaten getragen. Durch die ponticartige Gestaltung des mesialen Anhängers konnte während der Einheilzeit eine Ausformung der Weichgewebe Regio 41 erfolgen. Die Sofortversorgung von Einzelzahnrestaurationen auf Implantaten zeigt im Vergleich zu konventionell belasteten Kronen genauso erfolgreiche Ergebnisse hinsichtlich Implantüberlebensrate und marginalem Knochenverlust50.
Zehn Wochen nach der Implantation erfolgte die digitale Abformung der Implantate (Abb. 5a). Die definitive vollkeramische Versorgung konnte zwei Wochen später der Patientin eingegliedert werden (Abb. 5b). Dabei ist besonders auf die Lage des Zementspalts und die Entfernung der Zementreste zu achten, um der Entstehung einer Periimplantitis vorzubeugen6.
Abb. 3 a Ausgangssituation: Frontzahnlücke mit fehlenden Zähnen 31 und 41.
Abb. 3 b intraoraler Referenzmarker, befestigt an einer gedruckten Schablonenhalterung.
Abb. 3 c Es erfolgte ein krestaler Kammschnitt zur Darstellung des Implantatbetts.
Abb. 3 d Nach der Bildung eines Mukoperiostlappens war die knöcherne Situation frei ersichtlich.
Abb. 4 a Die Implantatbettaufbereitung erfolgte laut Herstellerprotokoll.
Abb. 4 b Die Implantatinsertion wurde wie alle Implantatbohrungen zuvor navigiert durchgeführt.
Abb. 4 c Das keramische Implantat Regio 31 in situ: Nachträglich wurden keine Änderungen der Implantatposition vorgenommen.
Abb. 5 a Zustand des Weichgewebes nach 2,5 Monaten: Ausformung der Weichgewebe durch das Ovate-Pontic-Design des Langzeitprovisoriums Regio 41.
Abb. 5 b Definitive vollkeramische Versorgung der Frontzahnlücke durch eine implantatgetragene Krone 31 mit Freiendbrückenglied 41 aus Zirkondioxid.
Schlussfolgerung
Mit der dynamischen Navigation kann eine präzise Implantatinsertion durchgeführt werden. Die Abweichungen der Implantatposition liegen in einem ähnlichen Bereich wie die der statischen Navigation. Sicherheitsabstände von 2 mm am Implantatapex sind einzuhalten. Gegenüber der Freihand-Implantation können genauere Ergebnisse erzielt werden. Man kann davon ausgehen, dass die Weiterentwicklung von Operationsverfahren durch Technologien der „virtual“ und „augmented reality“ die implantologische Versorgungsqualität steigern wird51.
Ein Beitrag von Dr. Cornelia Edelmann, Martin Wetzel und PD Dr. Sigmar Schnutenhaus, Hilzingen
¡AdBlocker activo! Por favor, espere un momento...
Nuestros sistemas informan de que está utilizando un software AdBlocker activo, que bloquea todo el contenido de la página para ser cargado.
Lo justo es justo: Nuestros socios de la industria ofrecen una importante contribución al desarrollo de este sitio de noticias con sus anuncios. Encontrará un claro número de estos anuncios en la página de inicio y en las páginas de artículos individuales.
Por favor, ponga www.quintessence-publishing.com en su «adblocker whitelist» o desactive su software de bloqueo de anuncios. Gracias.